A continuación, se explicará qué hace que el motor gire para un motor de inducción de CA trifásico. En la Figura 9, las ranuras del estator se ilustran con círculos pequeños y las líneas negras ilustran las bobinas en una fase del devanado del estator.
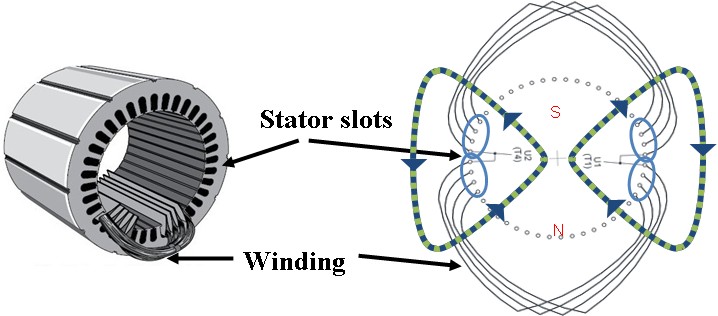
El devanado de la primera fase se divide en dos bobinas con ocho ranuras cada una, por lo que hay un total de dieciséis. Para cada bobina se utilizan cuatro para entrar, marcadas como U1 y cuatro para salir marcadas como U2. Tenga en cuenta que la cantidad de ranuras en el estator siempre será un múltiplo de 6 porque las bobinas trifásicas siempre usarán una ranura para entrar y otra para salir.
Ahora, cuando el voltaje está conectado, una corriente comienza a correr a través de las bobinas y esto creará un campo magnético alrededor de la bobina en la ranura. El campo magnético se muestra como líneas de rayas verdes y azules en la imagen de arriba.
La aplicación de la regla de la mano derecha que se mencionó anteriormente mostrará que la dirección del campo magnético alrededor de las ranuras donde entra la fase será en el sentido de las agujas del reloj y alrededor de las ranuras por donde sale será en sentido antihorario. Así es como se crea un electroimán con polo norte y polo sur en el motor de inducción. Como este motor solo crea un polo norte y un polo sur, se concluye que se trata de un motor de dos polos.
El núcleo del estator y, en especial, la parte entre las ranuras, normalmente denominada dientes del estator, actuará como el núcleo del electroimán y ayudará a transferir el campo magnético al rotor. El núcleo del estator se utiliza por dos razones. La primera razón es mantener las bobinas en su lugar. La segunda razón es ayudar a conducir el campo magnético. Ahora, una sola fase no va a hacer un motor, por lo que las otras dos fases deben agregarse. Agregue la misma cantidad de bobinas para la fase 2 y la fase 3 que se indican con los colores verde y rojo.
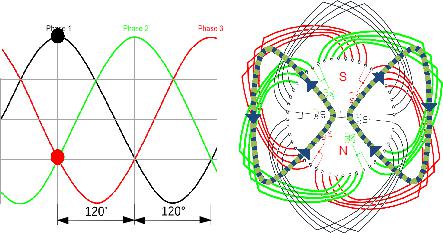
Estas dos bobinas de fase tienen sus extremos marcados como V1-V2 y W1-W2. Los puntos de colores indican la corriente en cada fase. A medida que las fases se alimentan con CA, la dirección de las corrientes varía todo el tiempo en un patrón de curva sinusoidal.
Ahora que la corriente cambia de dirección todo el tiempo, su poder para crear el campo magnético variará de acuerdo con el patrón de curva sinusoidal.
Eso significa que si la fase 1 tuvo el valor de corriente más alto, pronto cambiará de dirección y caerá. La siguiente en la línea será la fase 3 que alcanza su pico de corriente y el campo magnético se moverá a las bobinas de la fase 3 y luego a las bobinas de la fase 2. Esto significa que el campo magnético comenzará a girar en sentido contrario al reloj en el estator.
Al cambiar las fases que vienen de la red eléctrica para que la fase 2 se vuelva alta después de la fase 1, el campo magnético girará en sentido contrario. Cada fase tendrá sus propias bobinas y, dependiendo del tamaño del motor, variará la cantidad de ranuras utilizadas para una fase. A medida que aumenta el diámetro del núcleo del estator, también aumenta el número de ranuras del estator. Las bobinas de fase se repetirán luego para llenar todas las ranuras para alcanzar el número de polos deseado.
Entonces, con el uso de CA podemos obtener un campo magnético giratorio en el estator. Como ahora tenemos un campo magnético giratorio proyectado sobre el rotor desde el estator. Las barras del rotor están actualmente paradas, pero debido al campo magnético en movimiento, se inducirá una corriente en las barras del rotor. Ahora que tenemos una corriente en las barras del rotor y el campo magnético del estator, las barras del rotor se verán afectadas por la fuerza de Lorentz que se explicó en el capítulo 4.3 y comenzarán a girar en la misma dirección que el campo magnético giratorio.
El motor se llama motor asíncrono porque el rotor no gira con la misma velocidad que el campo magnético giratorio. Cuánto más lento gira el rotor en comparación con el campo giratorio se llama deslizamiento. Sin carga en el motor, el deslizamiento es cercano a cero. Sin embargo, a medida que aumentamos la carga en el motor, el deslizamiento también aumenta y si el deslizamiento es demasiado grande, el motor se para.
Es bastante complicado explicar esto en texto, pero fue mucho más fácil de explicar en PowerPoint ya que era posible usar imágenes animadas y videos para demostrar el campo magnético giratorio y el rotor giratorio. (LearnEngineering)
Anterior: Lección dos: teoría sobre el electromagnetismo
próximo: Lección cuatro: polos magnéticos y velocidad de rotación del motor



